Проект "Кинетическая скульптура "Монарх"
Содержание
Участники
Кафедра "Теоретическая механика"(наставник проекта)
Кухарски Филипп(руководитель)
Швец Даниил(участник проекта)
Аливохин Даниил(участник проекта)
Курлевский Алексей(участник проекта)
Латышева Юлия(участник проекта)
Байбородова Ирина(участник проекта)
Распределение обязанностей
| Участник | За что отвечает | Что сделал |
| Кухарски Филипп | Моделирование, контроль за выполнением заданий | Создал несколько моделей обвеса скульптуры в Fuscion 360 |
| Швец Даниил | Моделирование | Создал несколько моделей в программе Fusion 360, выдвинул идею крепления установки скульптуры и разработал 3D-модели креплений |
| Аливохин Даниил | Моделирование | Создал несколько моделей обвеса скульптуры в Fuscion 360 |
| Байбородова Ирина | Моделирование | Спроектировала несколько моделей обвеса |
| Латышева Юлия | Работа с письменной частью | Провела обзор аналогов |
| Курлевский Алексей | Работа с письменной частью | Провел обзор аналогов, создал страницу проекта на сайте кафедры |
Аналоги
Самые известные аналоги делает инженер Дэвид Рой. Его скульптуры работают на базе пружин, которые медленно высвобождают энергию, как в заводных игрушках или старинных часах. Вот некоторые примеры.
Модель "Infinity". Ширина и высота 35 дюймов, диаметр 7 дюймов. Время работы 8 часов

Модель "Blink". Ширина и высота 32 дюйма, диаметр 7 дюймов. Время работы 8 часов

Модель "Kindala - Sun". Ширина и высота 32 дюйма, диаметр 7 дюймов. Время работы 8 часов
Модель "Monarch II". Ширина и высота 34 дюйма, диаметр 7 дюймов. Время работы 6 часов




Кроме того, кинетическими скульптурами с оптическими иллюзиями занимается американец Энтони Хоу. Его скульптуры сделаны из нержавеющей стали и приводятся в движение силой ветра. Представим некоторые примеры.

Модель "Di-Octo". Высота скульптуры 7,5 м. Приводится в движение силой ветра. Конструкция выполнена из нержавеющей стали.
Модель "In Cloud III.". Высота скульптуры 7,6 м. Скульптура так же выполнена из нержавеющей стали и приводится в движение за счет силы ветра. Кроме того, модель спроектирована таким образом, что способна выдержать экстремальные погодные условия и ураганный ветер.


Моделирование проекта
Для создания модели нашего проекта будем использовать программу Fusion 360. Совместно посовещавшись, мы решили, что лопасти будут сделаны из фанеры и закреплены к деревянной коробке. В ней находится ременной механизм, в котором используется ремень из полиуретана без корда диаметром 5мм, прецизионный вал диаметром 8мм и шкивы, которые мы напечатали на 3D принтере. Держаться данная конструкция будет на стальных трубах. По предварительным подсчетам стоимость модели составляет 6443 руб.
Смоделированный проект
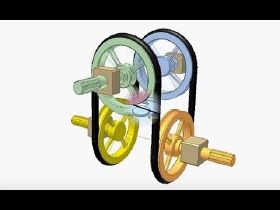
Ременной механизм нашей модели


Реализация проекта
Процесс печати шкива

Сборка коробки

Готовый ременной механизм



Результаты
- Удалось собрать модель
- Ременной механизм работает от ручного привода
- Визуальный эффект получается только под определенным углом

Заключение
В ходе работы мы собрали рабочую кинетическую модель. Ожидаемого эффекта получить не удалось, т.к. мы не учли большое расстояние между лопастями. Кроме того, наша модель работает только от ручного привода. Чтобы наша модель работала от механического привода, нужно придумать куда закрепить мотор и как соединить его с валом.