Робот Энигма — различия между версиями
(→Описание проекта) |
(→Внешний вид) |
||
| (не показана 1 промежуточная версия этого же участника) | |||
| Строка 31: | Строка 31: | ||
File:robot4.jpg|Вид спереди | File:robot4.jpg|Вид спереди | ||
</gallery> | </gallery> | ||
| + | [https://www.youtube.com/watch?v=bIBLItR5a-M&feature=youtu.be Видео-демонстрация возможностей робота Энигма] | ||
| + | |||
Робот Энигма, новая версия от 11 ноября (решили переставить робота на колеса): | Робот Энигма, новая версия от 11 ноября (решили переставить робота на колеса): | ||
Текущая версия на 00:44, 19 ноября 2015
Робот-вездеход ЭНИГМА
Содержание
Участники[править]
- Вараксин Олег (руководитель)
- Мерзлякова Юлия
- Михайлов Максим
Описание проекта[править]
Необходимо собрать мобильного робота-вездехода, способного преодолевать различные препятствия, обнаруживать и захватывать маяки на специальном полигоне робототехнических соревнований на Кубок РТК. Робот должен иметь дистанционное управление с возможностью переключения на выполнение заданий в автономном режиме.
Перечень препятствий и заданий Кубка РТК[править]
Для дистанционного управления: дверь, порог, наклонные поверхности с разными углами наклона: 15, 20, 30, 35 градусов с ровной/скользкой/травяной поверхностью, трава, камни, песок, бассейн с шариками, керамзит, гравий, крыша, кнопка, туман, сетка, трясина, качели, копыто, башня, лестничный марш, гипнодиск, подвесной мост, сбор маячков (банка 0.33).
Для выполнения в автоматическом режиме: движение по линии на старте, автоматический захват маяка, участок «Сплайн», цветное поле с расстановкой цветных маяков, автоматический заезд на башню.

Оборудование[править]
- Шасси : гусеничная платформа DAGU Rover5 chassis with 4 encoders 4motors
- Arduino Mega
- Манипулятор для захвата и подъема банок - из деталей Lego Technic
- Дистанционное управление по радио каналу c помощью модулей APC220
- Датчики линии Амперка
- ИК-дальномер Sharp
Внешний вид[править]
Робот Энигма на гусеничной платформе:
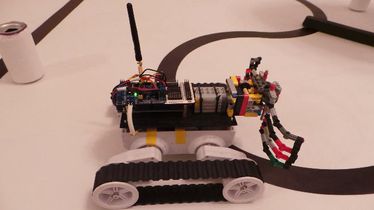
Вид сбоку
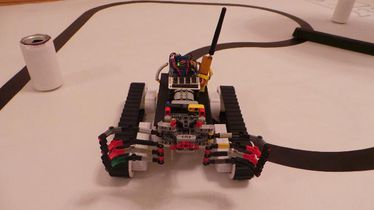
Вид спереди


Видео-демонстрация возможностей робота Энигма
Робот Энигма, новая версия от 11 ноября (решили переставить робота на колеса):


Схема[править]

Программирование[править]
coming soon..
Дистанционное управление[править]
Zelectro Controller - приложение от команды Zelectro (zelectro.com.ua), облегчающее управление вашей Arduino платой по каналам связи, эмулирующим COM порт. Полное руководство можно найти тут: http://zelectro.com.ua/ZController
 ]
]
Движение по линии[править]
coming soon..
Обнаружение и захват маяка[править]
coming soon..
Результаты[править]
19-20 сентября 2015г. в Санкт-Петербургском Экспоцентре ТК «Гарден Сити» прошел III этап молодежных робототехнических соревнований «Кубок РТК» в рамках ежегодного робототехнического фестиваля «Робофинист». Наш робот набрал 430 баллов и занял 8 место.




Планы[править]
Участие в финальных соревнованиях Кубка РТК 2015 2-4 декабря 2015 года в Москве, в рамках Национальной ежегодной выставки-форума ВУЗПРОМЭКСПО-2015.