|
|
| Строка 280: |
Строка 280: |
| | ==Расчеты элементов проекта== | | ==Расчеты элементов проекта== |
| | *Расчет расстояния и угла, на который необходимо отклонить маятник, чтобы он сбил домино | | *Расчет расстояния и угла, на который необходимо отклонить маятник, чтобы он сбил домино |
| − | <div class="mw-collapsible mw-collapsed">
| |
| − | <div class="mw-collapsible-content">
| |
| − | [[File:Угол маятника.png|thumb|250px|Схема для расчета расстояния и угла, на который надо отклонить маятник]]
| |
| − | ::<math>Дано:</math>
| |
| − | ::<math>r_{1}=0{,}02~м</math>
| |
| − | ::<math>l=0{,}07~м</math>
| |
| | | | |
| − | ::<math>Найти:~\alpha ,~r</math> | + | [[File:1.png|thumb|250px|Схема для расчета расстояния и угла, на который надо отклонить маятник]] |
| − | | |
| − | ::<math>Решение:</math>
| |
| − | ::<math>r_{1}=l\cdot sin\alpha _{1}</math>
| |
| − | ::<math>\alpha _{1}=arcsin(r_{1}/l)</math>
| |
| − | ::<math>\alpha = 3\alpha _{1} = 3arcsin(r_{1}/l)</math>
| |
| − | ::<math>r=l\cdot sin\alpha = l\cdot sin(3arcsin(r_{1}/l)) = 0{,}07\cdot sin(3arcsin(0{,}02/0{,}07))= 0{,}054~м</math>
| |
| − | ::<math>\alpha = 3arcsin(0{,}02/0{,}07) = 49{,}8^\circ </math>
| |
| − | | |
| − | ::<math>Ответ:</math>
| |
| − | ::<math>r=0{,}054~м,~\alpha =49{,}8^\circ </math>
| |
| − | | |
| − | </div>
| |
| − | </div>
| |
| | | | |
| | | | |
| Строка 399: |
Строка 380: |
| | </div> | | </div> |
| | </div> | | </div> |
| − |
| |
| − |
| |
| − |
| |
| | | | |
| | ==Расчеты элементов проекта== | | ==Расчеты элементов проекта== |
Версия 05:14, 3 июня 2019
Машина Голдберга, машина Руба Голдберга, машина Робинсона-Голдберга, Машина Робинсона или заумная машина — это устройство, которое выполняет очень простое действие чрезвычайно сложным образом — как правило, посредством длинной последовательности взаимодействий по «принципу домино».
Описание
Актуальность
Актуальность данного проекта заключается в том, что при создании машины Голдберга можно найти практическое применение курсу теоретической механики и научиться использовать оборудование для цифрового производства DFKit. В частности 3D принтер и ЧПУ лазерный станок.
Цель проекта
Создать машину Голдберга, которая будет выполнять цепочку взаимодействий, приводящих ко включению видео на ноутбуке.
Задачи проекта
- Определить последовательность действий, которые будут выполняться машиной Голдберга
- Подобрать необходимые материалы, предметы и инструменты для создания проекта
- Произвести расчеты и вычисления для определения параметров отдельных частей проекта
- Создать схему машины Голдберга
- Сделать отдельные части проекта
- Собрать машину Голдберга
- Произвести пробные запуски и устранить недочеты
- Смонтировать видео
- Произвести показательный запуск машины Голдберга
- Создать вики-страницу проекта
Проектная команда
Группа 13151/3
- Асатиани Александра
- Башаро Егор
- Гончар Виталий
- Елизаров Андрей
- Красников Вячеслав
- Кузнецов Николай
- Макеев Всеволод
- Новикова Валентина
- Озерова Надежда
- Сигунова Алика
- Соктоева Дулма
- Тихомиров Кирилл
- Ханычкова Анастасия
- Федотова Алёна
Работа по проекту
Действия, выполняемые машиной Голдберга

Схема устройства машины Голдберга, запускающей видео на ноутбуке
- Математический маятник сбивает домино-1.
- Домино-1 сбивает последующие домино, создавая цепную реакцию.
- Последнее домино-2 падает и роняет подставку-1.
- В отсутствии подставки мяч-1 катится по наклонной плоскости.
- Шар-1 сбивает стаканчики.
- Привязанная тонкой нерастяжимой нитью поставка-2 падает.
- В отсутствии подставки-2 шар-2 катится по наклонной плоскости.
- Мяч-2 сбивает домино-3.
- Домино-3 падает и сбивает полый цилиндр без оснований.
- Цилиндр катится по наклонной плоскости и сбивает бутылку.
- Бутылка сбивает подставку-3, прикрепленную на невесомую нерастяжимую нить-2.
- Шар-3 в отсутствии опоры катится по наклонной плоскости.
- Шар-3 сбивает кусок хлеба.
Материалы и предметы для создания проекта
- мячики
- фанера
- клей
- скотч
- нитки
- бутылка
- картон
- стаканчики пластиковые
- пенопласт
- губка посудомоечная
- хлеб
Инструменты для создания проекта
- ЧПУ лазерный станок DFKit
- Электроинструмент
- Ручной инструмент
Этапы создания проекта
| Срок
|
Задача
|
Возникающие проблемы
|
Что сделано к сроку
|
| 27.09.18
|
Определить последовательность действий машины Голдберга
|
Каждый предлагает свои идеи. Возникли разногласия по некоторым пунктам.
|
Определена основная последовательность.
|
| 04.10.18
|
Окончательно определить последовательность действий машины Голдберга
|
С трудом пришли к консенсусу.
|
Определена последовательность, сделан набросок действий.
|
| 11.10.18
|
Найти материалы для проекта
|
Материалы было решено искать среди остатков от производства. Взяли все, что не жалко.
|
Необходимые материалы были найдены.
|
| 18.10.18
|
Найти предметы и инструменты для проекта
|
С этим проблем не возникло. В ФабЛабе есть все необходимые инструменты: ЧПУ лазерный станок DFKit, 3D принтер DFKit и т.д.
|
Было найдено все необходимое.
|
| 25.10.18
|
Разбор этапов для расчетов
|
Сложности в определении задачи в целом
|
Начали решать проблему с расчетами.
|
| 01.11.18
|
Начало расчетов
|
Возникли проблемы с решением задач.
|
Определились до конца с расчетами. Разделили задания по группам.
|
| 08.11.18
|
Продолжение расчетов
|
Трудности с определением, какие законы необходимо применять
|
Выполнили часть расчетов.
|
| 15.11.18
|
Анализ этапов
|
Пружинящая поверхность оказалась сложна в расчетах и реализации.
|
Решили убрать пружинящую поверхность из проекта.
|
| 22.11.18
|
Закончить расчеты
|
Сложности в подведении итогов расчетов
|
Решили все задачи, выполнили все расчеты.
|
| 29.11.18
|
Создать схему
|
Понять, как лучше распределить этапы
|
Распределили этапы по группам. Каждая группа сделала чертеж своего этапа. Объединили все части в единое целое.
|
| 06.12.18
|
Сделать рычаги, лестницы, домино, качающийся маятник
|
Отсутствие навыков работы с инструментами.
|
Разделили работу по группам. Изучили, как работать с лазерным станком и 3D принтером, сделали с их помощью необходимые части проекта. Было сделано всё, что планировалось.
|
| 13.12.18
|
Покрасить домино. Собрать всё вместе. Сделать пробные запуски.
|
С кексиком возникли проблемы. Никто его не купил. Убрали кексик из проекта. Решили использовать зажигалку вместо свечки.
|
Попытались несколько раз запустить машину. Устранили недочёты, выявленные на пробных запусках: сделали подставки под лестницы и воронку, отпилили кусок воронки. Рычаг №3 будет нажимать не на кнопку, а на мышь.
|
| 20.12.18
|
Монтирование видео. Презентация машины Голдберга
|
Первая попытка запуска оказалась не совсем удачной, потому что загорелась краска на веревке. Запускать машину с помощью огня оказалось опасно.
|
Решили покрасить нашу машину Голдберга, чтобы она имела более презентабельный вид. В целях пожарной безопасности исключили зажигалку из проекта. В итоге удалось запустить нашу машину.
|
| 25.12.18
|
Создать вики-страницу проекта
|
Отсутствие знаний о создании вики-страниц
|
Результатом является данная страница
|
Расчеты элементов проекта
- Расчет расстояния и угла, на который необходимо отклонить маятник, чтобы он сбил домино
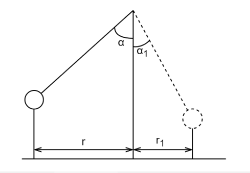
Схема для расчета расстояния и угла, на который надо отклонить маятник
- [math]Дано:[/math]
- [math]r_{1}=0{,}02~м[/math]
- [math]l=0{,}07~м[/math]
- [math]Найти:~\alpha ,~r[/math]
- [math]Решение:[/math]
- [math]r_{1}=l\cdot sin\alpha _{1}[/math]
- [math]\alpha _{1}=arcsin(r_{1}/l)[/math]
- [math]\alpha = 3\alpha _{1} = 3arcsin(r_{1}/l)[/math]
- [math]r=l\cdot sin\alpha = l\cdot sin(3arcsin(r_{1}/l)) = 0{,}07\cdot sin(3arcsin(0{,}02/0{,}07))= 0{,}054~м[/math]
- [math]\alpha = 3arcsin(0{,}02/0{,}07) = 49{,}8^\circ [/math]
- [math]Ответ:[/math]
- [math]r=0{,}054~м,~\alpha =49{,}8^\circ [/math]
- Проверка условия движения рычага №2 в результате падения шарика №1 на рычаг №1
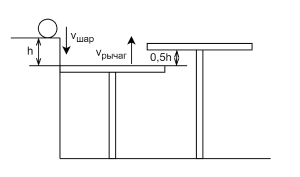
Схема взаимодействия шарика и двуплечих рычагов
- [math]Дано:[/math]
- [math]m_{шар}=0{,}03~кг[/math]
- [math]m_{рыч}=0{,}1~кг[/math]
- [math]h=0{,}1~м[/math]
- [math]Решение:[/math]
- [math]Перед ~соударением ~шарика ~с ~рычагом ~по ~закону ~сохранения ~энергии:[/math]
- [math]m_{шар}gh=\frac{m_{шар} \cdot v_{шар}^2}{2}[/math]
- [math]v_{шар}=\sqrt {2gh}=1{,}41~м/с [/math]
- [math]После ~соударения ~по ~закону ~сохранения ~энергии:[/math]
- [math]\frac{m_{шар} \cdot v_{шар}^2}{2}=\frac{m_{рыч} \cdot v_{рыч}^2}{2} + \frac{m_{шар} \cdot v_{шар~после}^2}{2}[/math]
- [math]По~закону ~сохранения ~импульса:[/math]
- [math]m_{рыч} \cdot v_{шар} = \frac{m_{рыч} \cdot v_{рыч}}{2} + v_{шар~после}\cdot m_{шар}[/math]
- [math]v_{рыч} = \frac{2\cdot m_{шар} \cdot v_{шар}}{m_{шар}+m_{рыч}/2} = \frac{2\cdot 0{,}03 \cdot 1{,}41}{0{,}03+0{,}1/2} = 1{,}065~м/с[/math]
- [math]По~закону ~сохранения ~импульса:[/math]
- [math]m_{шар} \cdot v_{шар} = m_{шар} \cdot v_{шар~после} + \frac{m_{рыч} \cdot v_{рыч}}{2}[/math]
- [math]Чтобы ~привести ~в ~движение ~рычаг ~№2, ~необходимо:[/math]
- [math]v_{рыч}\gt \sqrt {gh}=1 ~м/с[/math]
- [math]Ответ:[/math]
- [math]v_{рыч}=1{,}065~м/с~\gt \sqrt {gh}=1 ~м/с,~следовательно, ~вторая ~балка ~придёт ~в ~движение.[/math]
- Расчет импульса, который необходимо придать тележке для начала её движения вниз по склону
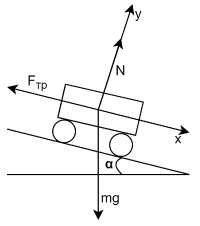
Схема для расчета импульса, необходимого для начала движения тележки
- [math]Дано:[/math]
- [math]m_{тележка}=0{,}15~кг[/math]
- [math]t=1~c[/math]
- [math]\alpha=45^\circ[/math]
- [math]\mu=0{,}2[/math]
- [math]Найти:~p[/math]
- [math]Решение:[/math]
- [math]p=F_{взаимод}\cdot t[/math]
- [math]\vec{F} + \vec{N} + m\vec{g} = 0[/math]
- [math]OX:~-F_{тр}+mg\cdot sin\alpha = 0[/math]
- [math]OY:~N=mg\cdot cos\alpha[/math]
- [math]F_{тр}=\mu \cdot N=\mu \cdot mg\cdot sin\alpha[/math]
- [math]F_{тр}=0{,}2\cdot 0{,}15\cdot 10\cdot \frac{\sqrt{2}}{2} = 0{,}21~H[/math]
- [math]p=0{,}21\cdot 1 = 0{,}21~\frac{кг\cdot м}{с}[/math]
- [math]Ответ:[/math]
- [math]p=0{,}21~\frac{кг\cdot м}{с}[/math]
- Расчет скорости, с которой должна ехать тележка, чтобы запустить цепную реакцию падающих домино
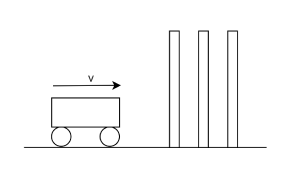
Схема для расчёта скорости, с которой тележка должна сбивать домино
- [math]Дано:[/math]
- [math]m_{тележка}=0{,}15~кг[/math]
- [math]m_{домино}=0{,}02~кг[/math]
- [math]t=1~c[/math]
- [math]Найти:~v[/math]
- [math]Решение:[/math]
- [math]p=F_{взаимод}\cdot t[/math]
- [math]F_{взаимод}\gt F_{т.домино}=m_{домино}\cdot g = 0{,}02\cdot 10 = 0{,}2~H[/math]
- [math]p_{тележка}=m_{тележка}\cdot v[/math]
- [math]v=\frac{p_{тележка}}{m_{тележка}}[/math]
- [math]p_{тележка}=p=F_{т.домино}\cdot dt[/math]
- [math]v=\frac{F_{т.домино}\cdot dt}{m_{тележка}} = \frac{0{,}2\cdot 1}{0{,}15} = 1{,}33~м/с[/math]
- [math]Ответ:[/math]
- [math]v=1{,}33~м/с[/math]
- Расчет массы рычага для нажатия на кнопку компьютерной мыши
- [math]Минимальное ~значение ~силы ~для ~нажатия ~кнопки:~F=0{,}68~H[/math]
- [math]F=m\cdot a=m\cdot g[/math]
- [math]m=\frac{F}{g} = \frac{0{,}68}{10} = 0{,}069~кг[/math]
- [math]Ответ:[/math]
- [math]m=0{,}069~кг[/math]
Расчеты элементов проекта
- Расчет расстояния и угла, на который необходимо отклонить маятник, чтобы он сбил домино
Схема для расчета расстояния и угла, на который надо отклонить маятник
- Проверка условия движения рычага №2 в результате падения шарика №1 на рычаг №1
Схема взаимодействия шарика и двуплечих рычагов
- [math]Дано:[/math]
- [math]m_{шар}=0{,}03~кг[/math]
- [math]m_{рыч}=0{,}1~кг[/math]
- [math]h=0{,}1~м[/math]
- [math]Решение:[/math]
- [math]Перед ~соударением ~шарика ~с ~рычагом ~по ~закону ~сохранения ~энергии:[/math]
- [math]m_{шар}gh=\frac{m_{шар} \cdot v_{шар}^2}{2}[/math]
- [math]v_{шар}=\sqrt {2gh}=1{,}41~м/с [/math]
- [math]После ~соударения ~по ~закону ~сохранения ~энергии:[/math]
- [math]\frac{m_{шар} \cdot v_{шар}^2}{2}=\frac{m_{рыч} \cdot v_{рыч}^2}{2} + \frac{m_{шар} \cdot v_{шар~после}^2}{2}[/math]
- [math]По~закону ~сохранения ~импульса:[/math]
- [math]m_{рыч} \cdot v_{шар} = \frac{m_{рыч} \cdot v_{рыч}}{2} + v_{шар~после}\cdot m_{шар}[/math]
- [math]v_{рыч} = \frac{2\cdot m_{шар} \cdot v_{шар}}{m_{шар}+m_{рыч}/2} = \frac{2\cdot 0{,}03 \cdot 1{,}41}{0{,}03+0{,}1/2} = 1{,}065~м/с[/math]
- [math]По~закону ~сохранения ~импульса:[/math]
- [math]m_{шар} \cdot v_{шар} = m_{шар} \cdot v_{шар~после} + \frac{m_{рыч} \cdot v_{рыч}}{2}[/math]
- [math]Чтобы ~привести ~в ~движение ~рычаг ~№2, ~необходимо:[/math]
- [math]v_{рыч}\gt \sqrt {gh}=1 ~м/с[/math]
- [math]Ответ:[/math]
- [math]v_{рыч}=1{,}065~м/с~\gt \sqrt {gh}=1 ~м/с,~следовательно, ~вторая ~балка ~придёт ~в ~движение.[/math]
- Расчет импульса, который необходимо придать тележке для начала её движения вниз по склону
Схема для расчета импульса, необходимого для начала движения тележки
- [math]Дано:[/math]
- [math]m_{тележка}=0{,}15~кг[/math]
- [math]t=1~c[/math]
- [math]\alpha=45^\circ[/math]
- [math]\mu=0{,}2[/math]
- [math]Найти:~p[/math]
- [math]Решение:[/math]
- [math]p=F_{взаимод}\cdot t[/math]
- [math]\vec{F} + \vec{N} + m\vec{g} = 0[/math]
- [math]OX:~-F_{тр}+mg\cdot sin\alpha = 0[/math]
- [math]OY:~N=mg\cdot cos\alpha[/math]
- [math]F_{тр}=\mu \cdot N=\mu \cdot mg\cdot sin\alpha[/math]
- [math]F_{тр}=0{,}2\cdot 0{,}15\cdot 10\cdot \frac{\sqrt{2}}{2} = 0{,}21~H[/math]
- [math]p=0{,}21\cdot 1 = 0{,}21~\frac{кг\cdot м}{с}[/math]
- [math]Ответ:[/math]
- [math]p=0{,}21~\frac{кг\cdot м}{с}[/math]
- Расчет скорости, с которой должна ехать тележка, чтобы запустить цепную реакцию падающих домино
Схема для расчёта скорости, с которой тележка должна сбивать домино
- [math]Дано:[/math]
- [math]m_{тележка}=0{,}15~кг[/math]
- [math]m_{домино}=0{,}02~кг[/math]
- [math]t=1~c[/math]
- [math]Найти:~v[/math]
- [math]Решение:[/math]
- [math]p=F_{взаимод}\cdot t[/math]
- [math]F_{взаимод}\gt F_{т.домино}=m_{домино}\cdot g = 0{,}02\cdot 10 = 0{,}2~H[/math]
- [math]p_{тележка}=m_{тележка}\cdot v[/math]
- [math]v=\frac{p_{тележка}}{m_{тележка}}[/math]
- [math]p_{тележка}=p=F_{т.домино}\cdot dt[/math]
- [math]v=\frac{F_{т.домино}\cdot dt}{m_{тележка}} = \frac{0{,}2\cdot 1}{0{,}15} = 1{,}33~м/с[/math]
- [math]Ответ:[/math]
- [math]v=1{,}33~м/с[/math]
- Расчет массы рычага для нажатия на кнопку компьютерной мыши
- [math]Минимальное ~значение ~силы ~для ~нажатия ~кнопки:~F=0{,}68~H[/math]
- [math]F=m\cdot a=m\cdot g[/math]
- [math]m=\frac{F}{g} = \frac{0{,}68}{10} = 0{,}069~кг[/math]
- [math]Ответ:[/math]
- [math]m=0{,}069~кг[/math]
Расчеты элементов проекта
- Расчет расстояния и угла, на который необходимо отклонить маятник, чтобы он сбил домино
Схема для расчета расстояния и угла, на который надо отклонить маятник
- [math]Дано:[/math]
- [math]r_{1}=0{,}02~м[/math]
- [math]l=0{,}07~м[/math]
- [math]Найти:~\alpha ,~r[/math]
- [math]Решение:[/math]
- [math]r_{1}=l\cdot sin\alpha _{1}[/math]
- [math]\alpha _{1}=arcsin(r_{1}/l)[/math]
- [math]\alpha = 3\alpha _{1} = 3arcsin(r_{1}/l)[/math]
- [math]r=l\cdot sin\alpha = l\cdot sin(3arcsin(r_{1}/l)) = 0{,}07\cdot sin(3arcsin(0{,}02/0{,}07))= 0{,}054~м[/math]
- [math]\alpha = 3arcsin(0{,}02/0{,}07) = 49{,}8^\circ [/math]
- [math]Ответ:[/math]
- [math]r=0{,}054~м,~\alpha =49{,}8^\circ [/math]
- Проверка условия движения рычага №2 в результате падения шарика №1 на рычаг №1
Схема взаимодействия шарика и двуплечих рычагов
- [math]Дано:[/math]
- [math]m_{шар}=0{,}03~кг[/math]
- [math]m_{рыч}=0{,}1~кг[/math]
- [math]h=0{,}1~м[/math]
- [math]Решение:[/math]
- [math]Перед ~соударением ~шарика ~с ~рычагом ~по ~закону ~сохранения ~энергии:[/math]
- [math]m_{шар}gh=\frac{m_{шар} \cdot v_{шар}^2}{2}[/math]
- [math]v_{шар}=\sqrt {2gh}=1{,}41~м/с [/math]
- [math]После ~соударения ~по ~закону ~сохранения ~энергии:[/math]
- [math]\frac{m_{шар} \cdot v_{шар}^2}{2}=\frac{m_{рыч} \cdot v_{рыч}^2}{2} + \frac{m_{шар} \cdot v_{шар~после}^2}{2}[/math]
- [math]По~закону ~сохранения ~импульса:[/math]
- [math]m_{рыч} \cdot v_{шар} = \frac{m_{рыч} \cdot v_{рыч}}{2} + v_{шар~после}\cdot m_{шар}[/math]
- [math]v_{рыч} = \frac{2\cdot m_{шар} \cdot v_{шар}}{m_{шар}+m_{рыч}/2} = \frac{2\cdot 0{,}03 \cdot 1{,}41}{0{,}03+0{,}1/2} = 1{,}065~м/с[/math]
- [math]По~закону ~сохранения ~импульса:[/math]
- [math]m_{шар} \cdot v_{шар} = m_{шар} \cdot v_{шар~после} + \frac{m_{рыч} \cdot v_{рыч}}{2}[/math]
- [math]Чтобы ~привести ~в ~движение ~рычаг ~№2, ~необходимо:[/math]
- [math]v_{рыч}\gt \sqrt {gh}=1 ~м/с[/math]
- [math]Ответ:[/math]
- [math]v_{рыч}=1{,}065~м/с~\gt \sqrt {gh}=1 ~м/с,~следовательно, ~вторая ~балка ~придёт ~в ~движение.[/math]
- Расчет импульса, который необходимо придать тележке для начала её движения вниз по склону
Схема для расчета импульса, необходимого для начала движения тележки
- [math]Дано:[/math]
- [math]m_{тележка}=0{,}15~кг[/math]
- [math]t=1~c[/math]
- [math]\alpha=45^\circ[/math]
- [math]\mu=0{,}2[/math]
- [math]Найти:~p[/math]
- [math]Решение:[/math]
- [math]p=F_{взаимод}\cdot t[/math]
- [math]\vec{F} + \vec{N} + m\vec{g} = 0[/math]
- [math]OX:~-F_{тр}+mg\cdot sin\alpha = 0[/math]
- [math]OY:~N=mg\cdot cos\alpha[/math]
- [math]F_{тр}=\mu \cdot N=\mu \cdot mg\cdot sin\alpha[/math]
- [math]F_{тр}=0{,}2\cdot 0{,}15\cdot 10\cdot \frac{\sqrt{2}}{2} = 0{,}21~H[/math]
- [math]p=0{,}21\cdot 1 = 0{,}21~\frac{кг\cdot м}{с}[/math]
- [math]Ответ:[/math]
- [math]p=0{,}21~\frac{кг\cdot м}{с}[/math]
- Расчет скорости, с которой должна ехать тележка, чтобы запустить цепную реакцию падающих домино
Схема для расчёта скорости, с которой тележка должна сбивать домино
- [math]Дано:[/math]
- [math]m_{тележка}=0{,}15~кг[/math]
- [math]m_{домино}=0{,}02~кг[/math]
- [math]t=1~c[/math]
- [math]Найти:~v[/math]
- [math]Решение:[/math]
- [math]p=F_{взаимод}\cdot t[/math]
- [math]F_{взаимод}\gt F_{т.домино}=m_{домино}\cdot g = 0{,}02\cdot 10 = 0{,}2~H[/math]
- [math]p_{тележка}=m_{тележка}\cdot v[/math]
- [math]v=\frac{p_{тележка}}{m_{тележка}}[/math]
- [math]p_{тележка}=p=F_{т.домино}\cdot dt[/math]
- [math]v=\frac{F_{т.домино}\cdot dt}{m_{тележка}} = \frac{0{,}2\cdot 1}{0{,}15} = 1{,}33~м/с[/math]
- [math]Ответ:[/math]
- [math]v=1{,}33~м/с[/math]
- Расчет массы рычага для нажатия на кнопку компьютерной мыши
- [math]Минимальное ~значение ~силы ~для ~нажатия ~кнопки:~F=0{,}68~H[/math]
- [math]F=m\cdot a=m\cdot g[/math]
- [math]m=\frac{F}{g} = \frac{0{,}68}{10} = 0{,}069~кг[/math]
- [math]Ответ:[/math]
- [math]m=0{,}069~кг[/math]





